
Page 103 - 2
P. 103
1. 개요
자이로센서와 가속도계가 합쳐진 MPU6050 을 이용한 로봇으로써 x 축, y 축, z 축 값을 측정하여 스스
로 중심을 잡는 로봇입니다 아두이노는 이 값을 이용해 연산하고. L298N 모터드라이버를 통해 모터를
제어합니다.
2. 조원 소개 및 역할 분담
이름 성별 특징 역할 비고
차우빈 남 모든 것에 적극적임 모든 회로설계 및 소프트웨어 하드웨어 제작
3. 제작 기간: 2017.3.~2017.11.
4. 작품 제작 계획하기
가 아이디어 구상.
아이디어를 구상 할 때 로봇이 세그웨이와 같이 두 바퀴를 통해 서있으면 참 편리 하겠구나 라고
생각하였다 그러하여 자이로센서를 이용하여 로봇 스스로 기울기에 따른 각도를 측정하여 모터의.
속도를 조절하여 혼자 중심을 잡는 것을 생각하게 되어 제작하였다.
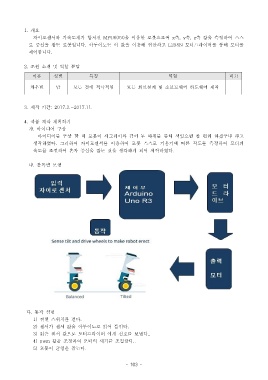
나 블록별 모형.
다 동작 설명.
1) 전원 스위치를 켠다.
2) 센서가 센서 값을 아두이노로 읽어 들인다.
3) 읽은 센서 값으로 모터드라이버 에게 신호를 보낸다..
4) pwm 값을 조정하여 모터의 세기를 조절한다..
5) 로봇이 균형을 잡는다.
- 103 -