
Page 65 - MDP2020-1
P. 65
················································································ 명장양성프로젝트 【MDP】 과제발표회 자료집 Ⅰ | 59
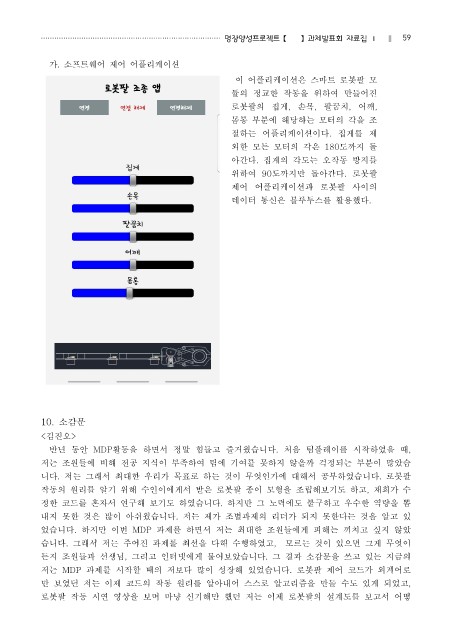
가. 소프트웨어 제어 어플리케이션
이 어플리케이션은 스마트 로봇팔 모
듈의 정교한 작동을 위하여 만들어진
로봇팔의 집게, 손목, 팔꿈치, 어깨,
몸통 부분에 해당하는 모터의 각을 조
절하는 어플리케이션이다. 집게를 제
외한 모든 모터의 각은 180도까지 돌
아간다. 집게의 각도는 오작동 방지를
위하여 90도까지만 돌아간다. 로봇팔
제어 어플리케이션과 로봇팔 사이의
데이터 통신은 블루투스를 활용했다.
10. 소감문
<김진오>
반년 동안 MDP활동을 하면서 정말 힘들고 즐거웠습니다. 처음 팀플레이를 시작하였을 때,
저는 조원들에 비해 전공 지식이 부족하여 팀에 기여를 못하지 않을까 걱정되는 부분이 많았습
니다. 저는 그래서 최대한 우리가 목표로 하는 것이 무엇인가에 대해서 공부하였습니다. 로봇팔
작동의 원리를 알기 위해 수인이에게서 받은 로봇팔 종이 모형을 조립해보기도 하고, 재희가 수
정한 코드를 혼자서 연구해 보기도 하였습니다. 하지만 그 노력에도 불구하고 우수한 역량을 뽐
내지 못한 것은 많이 아쉬웠습니다. 저는 제가 조별과제의 리더가 되지 못한다는 것을 알고 있
었습니다. 하지만 이번 MDP 과제를 하면서 저는 최대한 조원들에게 피해는 끼치고 싶지 않았
습니다. 그래서 저는 주어진 과제를 최선을 다해 수행하였고, 모르는 것이 있으면 그게 무엇이
든지 조원들과 선생님, 그리고 인터넷에게 물어보았습니다. 그 결과 소감문을 쓰고 있는 지금의
저는 MDP 과제를 시작할 때의 저보다 많이 성장해 있었습니다. 로봇팔 제어 코드가 외계어로
만 보였던 저는 이제 코드의 작동 원리를 알아내어 스스로 알고리즘을 만들 수도 있게 되었고,
로봇팔 작동 시연 영상을 보며 마냥 신기해만 했던 저는 이제 로봇팔의 설계도를 보고서 어떻