
Page 80 - MDP2020-3
P. 80
74
| 인천전자마이스터고등학교 ·············································································································
제 4 장 메커니즘 설계
1. 개요
총 포맥스를 3층에 나누어 만들었다. 최상단 부에는 사료를 공급 할 큰 통과 중간 부분에는
모터를 회전시켜 사료를 이동시키는 통을 구성하였고, 하단부에는 공급된 사료를 개들에게 공급
될 수 있도록 구멍과 라인을 뚫어놓았다.
2. 기구물
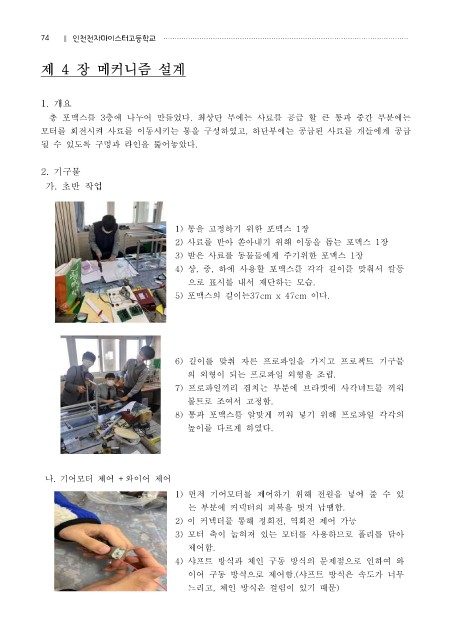
가. 초반 작업
1) 통을 고정하기 위한 포맥스 1장
2) 사료를 받아 쏟아내기 위해 이동을 돕는 포맥스 1장
3) 받은 사료를 동물들에게 주기위한 포맥스 1장
4) 상, 중, 하에 사용할 포맥스를 각각 길이를 맞춰서 칼등
으로 표시를 내서 재단하는 모습.
5) 포맥스의 길이는37cm x 47cm 이다.
6) 길이를 맞춰 자른 프로파일을 가지고 프로젝트 기구물
의 외형이 되는 프로파일 외형을 조립.
7) 프로파일끼리 겹치는 부분에 브라켓에 사각너트를 끼워
볼트로 조여서 고정함.
8) 통과 포맥스를 알맞게 끼워 넣기 위해 프로파일 각각의
높이를 다르게 하였다.
나. 기어모터 제어 +와이어 제어
1) 먼저 기어모터를 제어하기 위해 전원을 넣어 줄 수 있
는 부분에 커넥터의 피복을 벗겨 납땜함.
2) 이 커넥터를 통해 정회전, 역회전 제어 가능
3) 모터 축이 눕혀져 있는 모터를 사용하므로 폴리를 달아
제어함.
4) 샤프트 방식과 체인 구동 방식의 문제점으로 인하여 와
이어 구동 방식으로 제어함.(샤프트 방식은 속도가 너무
느리고, 체인 방식은 걸림이 있기 때문)