
Page 70 - MDP2022-2
P. 70
제 2 장 하드웨어 설계
1. 개요
가. 제작동기
스마트 서빙로봇을 제작하려 했으나 인공지능의 핵심인 라이다를 구동하는데 실패하여 남은 부
품들을 가지고 무선조종 rc카를 개발하게 되었다. 충돌방지를 위해서 전방에 초음파센서를 부착
하여 30cm 이내 물체감지시 동작은 동작을 정지하는 기능을 추가하였다.
나. 활용가능성
자동차를 이용하여 물건을 운반할수 있다.
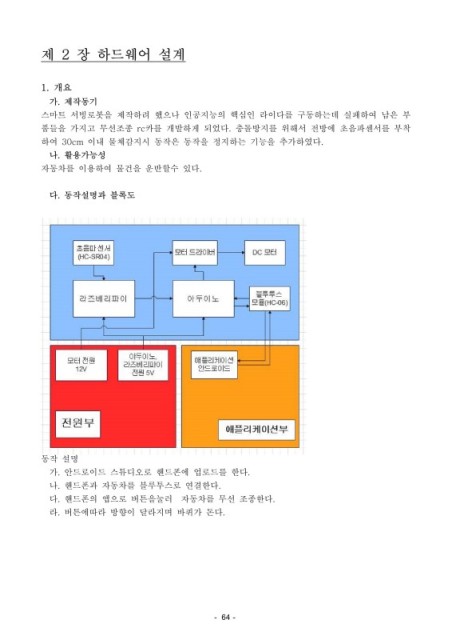
다. 동작설명과 블록도
동작 설명
가. 안드로이드 스튜디오로 핸드폰에 업로드를 한다.
나. 핸드폰과 자동차를 블루투스로 연결한다.
다. 핸드폰의 앱으로 버튼을눌러 자동차를 무선 조종한다.
라. 버튼에따라 방향이 달라지며 바퀴가 돈다.