
Page 10 - 완) I MDP 프로젝트 작품 보고서(전체과 1학년)1.6
P. 10
1. 동기 및 기본 설명
라인트레이서 로봇은 74HC08, 74HC14, 74HC32 논리게이트 IC와 적외선 발광·수광 센서를
이용하여 빛의 반사량 차이에 따라 흰색 바탕에 검은색 주행선을 감지하여 모터의 동작을 제
어하고, 이동 방향을 바꿔 라인을 따라 움직이는 로봇임. 전자회로설계를 하였으며, 회로의
구성은 센서부, 처리부, 모터부, 전원부로 구성되었습니다. 기초전자회로 및 적외선 센서에
대한 이해를 바탕으로 로봇의 회로 및 바디(BODY)를 직접 제작하여 로봇을 완성하였음.
2. 시스템 블록
전원부 입력장치 처리장치 출력장치
·건전지 AAA OR ·적외선 발광 · 74HC08 · 트랜지스터
AA 4개 → 센서(EL-7L) → · 74HC14 → · 가변 저항
·1N4001 다이오드 · 74HC32
·커패시터 ·적외선 수광 · 저항
·슬라이드 스위치 선서(ST-7L) · LED · DC 모터
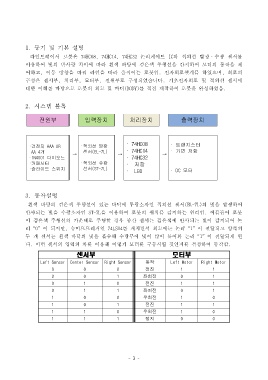
3. 동작설명
흰색 바탕의 검은색 주행선이 있는 바닥에 투광소자인 적외선 센서(EL-7L)의 빛을 발생하여
반사되는 빛을 수광소자인 ST-7L을 이용하여 로봇의 위치를 감지하는 원리임. 예를들어 로봇
이 검은색 주행선의 가운데로 주행할 경우 중간 센서는 검은색에 반사되는 빛이 감지되어 논
리“0”이 되지만, 슈미트트리거인 74LS14를 거치면서 회로에는 논리“1”이 전달되고 양쪽의
두 개 센서는 흰색 바닥의 빛을 흡수해 수광부에 빛이 많이 들어와 논리“1”이 전달되게 된
다. 이런 센서의 입력의 차를 이용해 어떻게 모터를 구동시킬 것인지를 결정하여 동작함.
센서부 모터부
Left Sensor Center Sensor Right Sensor 동작 Left Motor Right Motor
0 0 0 전진 1 1
0 0 1 좌회전 0 1
0 1 0 전진 1 1
0 1 1 좌회전 0 1
1 0 0 우회전 1 0
1 0 1 전진 1 1
1 1 0 우회전 1 0
1 1 1 정지 0 0
- 3 -