
Page 12 - 완) I MDP 프로젝트 작품 보고서(전체과 1학년)1.6
P. 12
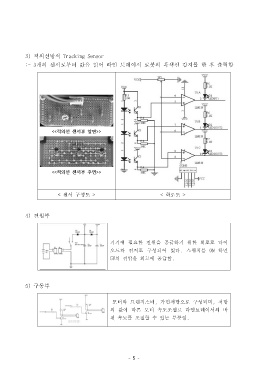
3) 적외선방식 Tracking Sensor
:- 3개의 센서로부터 값을 읽어 라인 트레이서 로봇의 흑색선 감지를 한 후 출력함
<<적외선 센서부 앞면>>
<<적외선 센서부 후면>>
< 센서 구성도 > < 회로도 >
4) 전원부
기기에 필요한 전원을 공급하기 위한 회로로 다이
오드와 전지로 구성되어 있다. 스위치를 ON 하면
5V의 전압을 회로에 공급함.
5) 구동부
모터와 트랜지스터, 가변저항으로 구성되며, 저항
의 값에 따른 모터 속도조절로 라인트레이서의 바
퀴 속도를 조절할 수 있는 부분임.
- 5 -