
Page 250 - 2
P. 250
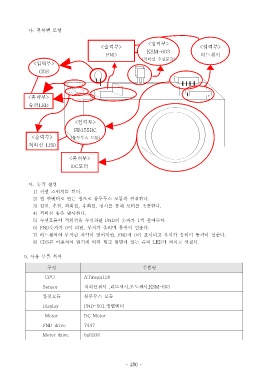
나 블록별 모형.
< 입력부>
< 출력부> < 입력부>
KSM-603
FND 리드센서
( 적외선 수신모듈)
< 입력부>
CDS
< 출력부>
슈퍼LED
< 입력부>
FB155BC
< 출력부> ( 블루투스 모듈)
적외선 LED
< 출력부>
DC 모터
다 동작 설명.
1) 전원 스위치를 켠다.
2) 앱 인벤터로 만든 앱으로 블루투스 모듈과 연결한다.
3) 전진 후진 좌회전 우회전 정지를 통해 모터를 조종한다, , , , .
4) 적외선 총을 발사한다.
5) 수신모듈이 적외선을 수신하면 FND 의 숫자가 1 씩 줄어든다.
6) FND 숫자가 0 이 되면 부저가 울리며 동작이 멈춘다, .
7) 리드센서의 부착된 자석이 떨어지면, FND 에 0 이 표시되고 부저가 울리며 동작이 멈춘다.
8) CDS 를 이용하여 밝기에 따라 탱크 앞면에 있는 슈퍼 LED 가 켜지고 꺼진다.
5. 사용 부품 목록
구성 부품명
CPU ATmega128
Sensor 적외선센서 리드센서 조도센서, , ,KSM-603
통신모듈 블루투스 모듈
Display FND-501, 앱인벤터
Motor DC Motor
FND drive 7447
Motor drive ba6208
- 250 -