
Page 317 - 2
P. 317
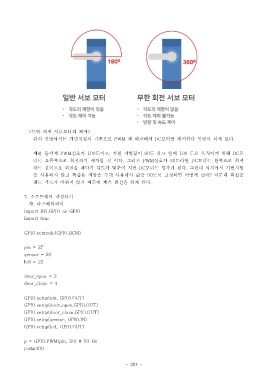
< 무한 회전 서보모터의 제어>
위의 설명에서는 가변저항의 기준으로 PWM 과 비교해서 DC 모터를 제어한다 설명이 되어 있다.
예를 들어서 PWM 신호가 100 도이고 가변 저항값이, 90 도 라고 할때 100 도로 움직이기 위해 DC 모
터는 오른쪽으로 회전하기 시작할 것 이다 그리고. PWM 신호가 80 도라면 DC 모터는 왼쪽으로 회전
하는 것이고요 회전을 하다가 각도가 맞추어 지면 DC 모터는 멈추게 된다 그런데 여기에서 가변저항.
을 사용하지 않고 똑같은 저항을 두개 사용해서 값을 90 도로 고정하면 어떻게 될까? 아무리 회전을
해도 각도가 바뀌지 않기 때문에 계속 회전을 하게 된다.
7. 소프트웨어 작성하기
가 라즈베리파이.
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
pin = 27
sensor = 23
led = 22
door_open = 3
door_close = 4
GPIO.setup(pin, GPIO.OUT)
GPIO.setup(door_open,GPIO.OUT)
GPIO.setup(door_close,GPIO.OUT)
GPIO.setup(sensor, GPIO.IN)
GPIO.setup(led, GPIO.OUT)
p = GPIO.PWM(pin, 50) # 50 Hz
p.start(0)
- 317 -