
Page 52 - MDP2020-1
P. 52
| 인천전자마이스터고등학교 ·············································································································
46
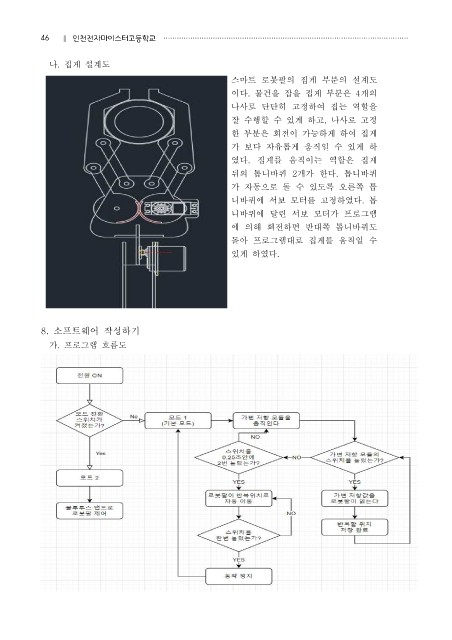
나. 집게 설계도
스마트 로봇팔의 집게 부분의 설계도
이다. 물건을 잡을 집게 부분은 4개의
나사로 단단히 고정하여 집는 역할을
잘 수행할 수 있게 하고, 나사로 고정
한 부분은 회전이 가능하게 하여 집게
가 보다 자유롭게 움직일 수 있게 하
였다. 집게를 움직이는 역할은 집게
뒤의 톱니바퀴 2개가 한다. 톱니바퀴
가 자동으로 돌 수 있도록 오른쪽 톱
니바퀴에 서보 모터를 고정하였다. 톱
니바퀴에 달린 서보 모터가 프로그램
에 의해 회전하면 반대쪽 톱니바퀴도
돌아 프로그램대로 집게를 움직일 수
있게 하였다.
8. 소프트웨어 작성하기
가. 프로그램 흐름도