
Page 312 - 완) I MDP 프로젝트 작품 보고서(전체과 1학년)1.6
P. 312
streamer를 통해 영상을 WIFI로 전송한다. 그리고 웹 브라우저로 영상을 확인할 수
있다. 또한, 라즈베리파이의 GPIO(General Purpose Input Output)를 이용하여 고휘
도 LED를 장착함으로 조명을 구현하여 야간 주행을 가능하게 하였다.
3. 소프트웨어 개요
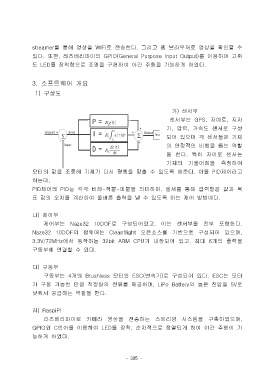
1) 구성도
가) 센서부
센서부는 GPS, 자이로, 지자
기, 압력, 가속도 센서로 구성
되어 있으며 각 센서들은 기체
의 안정적인 비행을 돕는 역할
을 한다. 특히 자이로 센서는
기체의 기울어짐을 측정하여
모터의 값을 조종해 기체가 다시 평행을 맞출 수 있도록 해준다. 이를 PID제어라고
하는데,
PID제어의 PID는 각각 비례-적분-미분을 의미하며, 센서를 통해 입력받은 값과 목
표 값의 오차를 계산하여 올바른 출력을 낼 수 있도록 하는 제어 방법이다.
나) 제어부
제어부는 Naze32 10DOF로 구성되어있고, 이는 센서부를 전부 포함한다.
Naze32 10DOF의 펌웨어는 Cleanflight 오픈소스를 기반으로 구성되어 있으며,
3.3V/72MHz에서 동작하는 32bit ARM CPU가 내장되어 있고, 최대 6개의 출력을
구동부에 연결할 수 있다.
다) 구동부
구동부는 4개의 Brushless 모터와 ESC(변속기)로 구성되어 있다. ESC는 모터
가 구동 가능한 만큼 적정량의 전류를 제공하며, LiPo Battery의 높은 전압을 5V로
낮춰서 공급하는 역할을 한다.
라) RaspiPI
라즈베리파이로 카메라 영상을 전송하는 스트리밍 시스템을 구축하였으며,
GPIO와 C언어를 이용하여 LED를 장착, 순차적으로 점멸되게 하여 야간 주행이 가
능하게 하였다.
- 305 -