
Page 311 - 완) I MDP 프로젝트 작품 보고서(전체과 1학년)1.6
P. 311
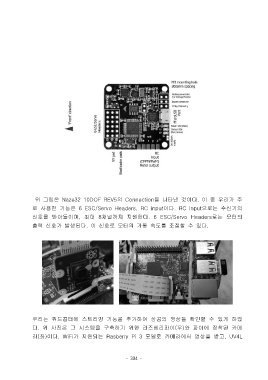
위 그림은 Naze32 10DOF REV5의 Connection을 나타낸 것이다. 이 중 우리가 주
로 사용한 기능은 6 ESC/Servo Headers, RC input이다. RC input으로는 수신기의
신호를 받아들이며, 최대 8채널까지 지원한다. 6 ESC/Servo Headers로는 모터의
출력 신호가 발생된다. 이 신호로 모터의 가동 속도를 조절할 수 있다.
우리는 쿼드콥터에 스트리밍 기능을 추가하여 상공의 영상을 확인할 수 있게 하였
다. 위 사진은 그 시스템을 구축하기 위한 라즈베리파이(우)와 파이에 장착된 카메
라(좌)이다. WiFi가 지원되는 Rasberry Pi 3 모델로 카메라에서 영상을 받고, UV4L
- 304 -