
Page 968 - 완) I MDP 프로젝트 작품 보고서(전체과 1학년)1.6
P. 968
4. 연결 후 중앙부에서 전송한 좌표 정보를 수신한다.
5. 방향과 거리를 계산 후 LCD에 방향 및 좌표를 출력한다.
6. 구동부가 진행할 방향을 전환하고 진행한다.
7. 무한 대기한다.
외부 인터럽트 순서
1. 대기 중 스위치 0번의 인터럽트를 받는다.
2. PD에 연결된 스위치 입력을 받는다.
3. 각 방향에 맞게 진행한다.
테스트부를 제작하지 않았으므로 외부 인터럽트도 사용하지 않는다. 또한 LCD도 장착하지 않
으므로 출력하는 부분은 제외한다.
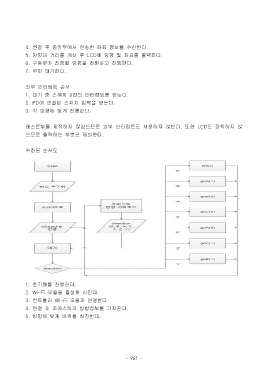
수정된 순서도
1. 초기화를 진행한다.
2. Wi-Fi 모듈을 활성화 시킨다.
3. 컨트롤러 Wi-Fi 모듈과 연결한다.
4. 연결 후 조이스틱의 방향정보를 가져온다.
5. 방향에 맞게 바퀴를 회전한다.
- 961 -