
Page 326 - 완) I MDP 프로젝트 작품 보고서(전체과 1학년)1.6
P. 326
도체가 가까이 접근하면 발생하는 유도전류와 와전류를 감지하여 금속의 여부를 감
지한다.
센서부는 1개의 금속탐지기와 2개의 서보모터로 이루어져 있다.
2개의 서보모터는 바닥과 수직인 x축과 바닥과 수평인 y축으로 나눌 수 있는데,
x축은 금속탐지기를 와이퍼처럼 왕복 운동시켜 넓은 범위의 탐지가 가능하다.
y축은 1번 사진처럼 금속탐지기의 구조상 경사진 지형을 올라갈 때, 금속탐지기가
바닥에 걸리기 때문에 ‘E’키를 이용하여, 평소에는 와이퍼처럼 동작을 하다가 ‘E’를
한번 누르면 2번 사진처럼 금속탐지기가 접혀 경사진 지형을 오를 수 있다.
센서의 ON/OFF는 트랜지스터를 이용하여 제어하였다.
나) 구동부
(1)로봇팔
로봇팔은 옆에 보이는 오픈소스인 Poket sized
robot arm을 기반으로 2.5배 크기로 만들었다.
새로운 축을 추가했으며 집게부는 완전히 새로
제작하였다.
오픈소스의 로봇팔은 앞뒤, 좌우, 위아래, 집게
총 4개의 축으로 동작한다.
구조상 집게부는 바닥과 평행하게 움직이기 때문
에 물건을 집을 때 제한이 많다. 우리 조는 이런
점을 고려하여 집게회전이라는 새로운 축을 추가하여 행동반경을 넓혔다.
마우스로 앞.뒤, 좌,우, 스크롤로 위.아래, 스페이스바와 쉬프트로 집게회전, 마우스
왼쪽 버튼은 집게를 제어하도록 설계하였다.
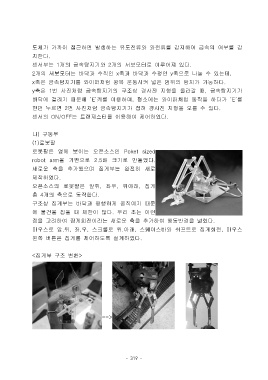
<집게부 구조 변환>
==>
- 319 -