
Page 532 - 완) I MDP 프로젝트 작품 보고서(전체과 1학년)1.6
P. 532
4. 동작 개요
이 로봇은 핸드폰 앱에서 신호를 블루투스로 보내 ATmega128로 받고 그에 맞는 동
작을 하게 된다. 앱에서 로봇이 움직이는 방향을 조종하는 것은 조이스틱으로 되어있
다. 동그란 모양의 조이스틱을 여섯 부분으로 나눠서 직진, 후진, 앞으로 좌회, 앞으로
우회, 뒤로 좌회, 뒤로 우회 여섯 가지 동작을 하게 한다.
조이스틱 옆의 상하 화살표로 된 두 버튼은 위를 눌렀을 때는 PI camera를 위로 올려
서 위를 볼 수 있도록 한다. 아래의 버튼을 눌렀을 때는 PI camera를 아래로 내려서
아래를 볼 수 있도록 한다. 버튼을 누르지 않은 상태일 때는 PI camera를 현재 위치에
고정되어 있도록 한다.
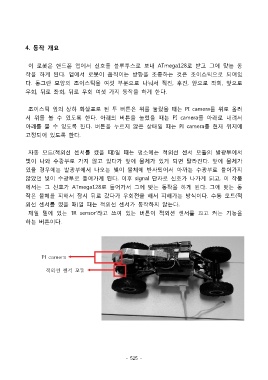
자동 모드(적외선 센서를 켰을 때)일 때는 평소에는 적외선 센서 모듈의 발광부에서
빛이 나와 수광부로 가지 않고 있다가 앞에 물체가 있게 되면 달라진다. 앞에 물체가
있을 경우에는 발광부에서 나오는 빛이 물체에 반사되어서 아까는 수광부로 들어가지
않았던 빛이 수광부로 들어가게 된다. 이후 signal 단자로 신호가 나가게 되고, 이 작품
에서는 그 신호가 ATmega128로 들어가서 그에 맞는 동작을 하게 된다. 그에 맞는 동
작은 물체를 피해서 잠시 뒤로 갔다가 우회전을 해서 피해가는 방식이다. 수동 모드(적
외선 센서를 껐을 때)일 때는 적외선 센서가 동작하지 않는다.
제일 밑에 있는 'IR sensor'라고 쓰여 있는 버튼이 적외선 센서를 끄고 켜는 기능을
하는 버튼이다.
PI camera
적외선 센서 모듈
- 525 -