
Page 879 - 완) I MDP 프로젝트 작품 보고서(전체과 1학년)1.6
P. 879
3. 회로도
가. 개요
ORCAD로 스케메틱 회로를 만들 때 라이브러리에 없는 부품들을 직접 만들어 사용해야 했기
때문에 Cortex-M3와 스텝 모터, 스텝 모터 드라이버는 직접 데이터시트와 인터넷 자료들을
참고하여 만들었고, 풋프린트 역시 모듈 형태를 본떠서 만들어 사용하였다.
메인 회로부를 최대한 작게 만들어야만 중앙부에 들어가는 아크릴판의 크기가 작아질 수 있
고 무게를 줄일 수 있기 때문에 대부분의 부품들을 모듈의 형태로 사용하였고, 파워서플라이
와 센서들은 메인회로에 내장 하지 않고 커넥터를 통해 연결하여 차지할 자리를 최대한 줄일
수 있도록 만들었다.
제어에 사용되는 라즈베리파이에 무선 랜카드를 연결하여 메인회로에 내장할 수 있었다. 또한,
Cortex-M3와 시리얼 통신을 하기 위해 USART PORT인 RX핀과 TX핀을 서로 연결하였다.
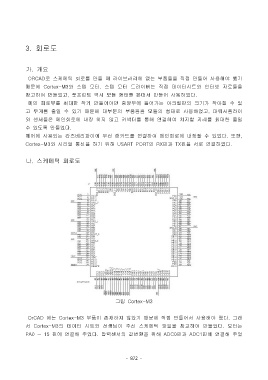
나. 스케메틱 회로도
그림 Cortex-M3
OrCAD 에는 Cortex-M3 부품이 존재하지 않았기 때문에 직접 만들어서 사용해야 했다. 그래
서 Cortex-M3의 데이터 시트와 선생님이 주신 스케메틱 파일을 참고하여 만들었다. 모터는
PA0 ~ 15 핀에 연결해 주었다. 압력센서의 값변환을 위해 ADC0핀과 ADC1핀에 연결해 주었
- 872 -