
Page 938 - 완) I MDP 프로젝트 작품 보고서(전체과 1학년)1.6
P. 938
1) 구동부 블록도
12v를 받아 모터 드라이버등 필요한 곳에 공급하고 STM32F103VB 와 LCD등 반도체에는
3.3v 레귤레이터를 통해 3.3v를 공급한다.
스마트 쓰레기통을 제어하는 STM32F103VB와 구동부의 핵심중 하나인 모터와 모터 드라이버
가 있다. 모터에는 옴니휠이 장착되어 있어 전 방향으로 진행할 수 있다. Wi-Fi 모듈을 사용해
중앙부와 통신할 수 있도록 하였고 적외선 센서를 사용해 스마트 쓰레기통의 내부와 외부의
현황을 알 수 있도록 하였다. LCD와 LED등을 활용해 현재 상황을 외부로 알 수 있도록 하였
다.
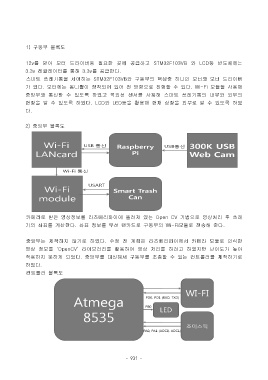
2) 중앙부 블록도
카메라로 받은 영상정보를 라즈베리파이에 올려져 있는 Open CV 기법으로 영상처리 후 쓰레
기의 좌표를 계산한다. 좌표 정보를 무선 랜카드로 구동부의 Wi-Fi모듈로 전송해 준다.
중앙부는 제작하지 않기로 하였다. 수정 전 계획은 라즈베리파이에서 카메라 모듈로 인식한
영상 정보를 'OpenCV‘ 라이브러리를 활용하여 영상 처리를 하려고 하였지만 난이도가 높아
적용하지 못하게 되었다. 중앙부를 대신해서 구동부를 조종할 수 있는 컨트롤러를 제작하기로
하였다.
컨트롤러 블록도
- 931 -