
Page 510 - 2
P. 510
다 회전각 검출을 위한) feedback 이 불필요하여 제어계가 간단해서 가격이 상대적으로 저렴하다, .
라) DC motor 등과 같이 brush 교환 등과 같은 보수를 필요로 하지 않고 신뢰성이 높다.
마 모터 축에 직결함으로써 초 저속 동기 회전이 가능하다) .
바 기동 및 정지 응답성이 양호하므로) servo motor 로써 사용가능하다.
2) 단점
가 어느 주파수에서는 진동 공진 현상이 발생하기 쉽고 관성이 있는 부하에 약하다) , , .
나 고속 운전 시에 탈조하기 쉽다) .
다 보통의) driver 도 구동 시에는 권선의 인덕턴스 영향으로 인하여 권선에 충분한 전류를 흘리게
할 수 없으므로 pulse 비가 상승함에 따라 torque 가 저하하며 DC motor 에 비해
효율이 떨어진다.
다. Stepping motor 의 동작 원리
Stepping motor 에서 그 내부를 구성하는 고정자라고 불리 우는 극의 수에 따라 단상 상(1 ), 2 상, 3
상, 4 상, 5 상, 6 상 등의 종류가 있으며 기본적으로 이 극의 수에 따라, motor 의 step 각 등의 기본
특성이 달라진다 여기서는 일반적으로 가장 많이 사용되고 있는. 4 상 stepping motor 를 예를 들어
동작원리에 대해 설명한다.
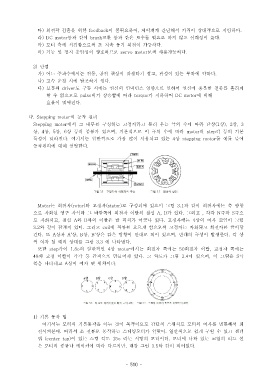
Motor 는 회전자(rotor) 와 고정자(stator) 로 구성되어 있으며 그림 3.1 과 같이 회전자에는 축 방향
으로 자화된 영구 자석과 그 바깥쪽에 회전자 이빨의 철심 A, B 가 있다 그리고. , 각각 N 극과 S 극으
로 자화되고 철심, A 와 B 와의 이빨은 반 피치가 어긋나 있다 고정자에는. 4 상의 여자 코일이 그림
3.2 와 같이 감겨져 있다 그리고. coil 에 직류를 흐르게 함으로써 고정자는 자화되고 회전자를 끌어당
긴다 또. A 상과 A' 상, B 상, B' 상은 감은 방향이 반대로 되어 있으며 반대의 극성이 발생한다 각 상, .
씩 여자 할 때의 상태를 그림 3.3 에 나타낸다.
또한 step 각이 1.8o 의 일반적인 4 상 motor 에서는 회전자 쪽에는 50 회전자 이빨 고정자 쪽에는,
48 의 고정 이빨이 각각 등 간격으로 만들어져 있다 그 약도가 그림. 3.4 에 있으며 이 그림은, S 극
쪽을 나타내고 A 상이 여자 된 위치이다.
1) 기본 동작 법
여기서는 모터의 기본동작을 아는 것이 목적이므로 간단히 스위치로 모터의 여자를 변환해서 회
전시켜본다 따라서 소 전류로 동작하는 스테핑모터가 알맞다 일반적으로 쉽게 구할 수 있고 센터. .
탭 (center tap) 이 있는 스텝 각도 15o 라는 시방의 모터이다 모터에 나와 있는 코일의 리드 선.
은 모터의 종류나 메이커에 따라 다르지만 대강 그림, 3.5 와 같이 되어있다.
- 510 -