
Page 228 - MDP2020-1
P. 228
| 인천전자마이스터고등학교 ·············································································································
222
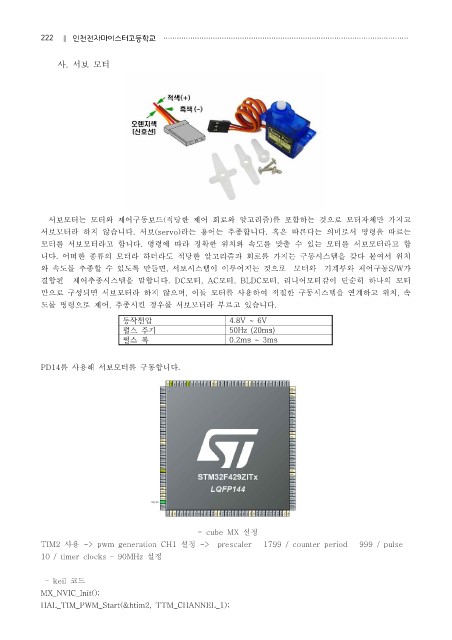
사. 서보 모터
서보모터는 모터와 제어구동보드(적당한 제어 회로와 알고리즘)를 포함하는 것으로 모터자체만 가지고
서보모터라 하지 않습니다. 서보(servo)라는 용어는 추종합니다. 혹은 따른다는 의미로서 명령을 따르는
모터를 서보모터라고 합니다. 명령에 따라 정확한 위치와 속도를 맞출 수 있는 모터를 서보모터라고 합
니다. 어떠한 종류의 모터라 하더라도 적당한 알고리즘과 회로를 가지는 구동시스템을 갖다 붙여서 위치
와 속도를 추종할 수 있도록 만들면, 서보시스템이 이루어지는 것으로 모터와 기계부와 제어구동S/W가
결합된 제어추종시스템을 말합니다. DC모터, AC모터, BLDC모터, 리니어모터같이 단순히 하나의 모터
만으로 구성되면 서보모터라 하지 않으며, 이들 모터를 사용하여 적절한 구동시스템을 연계하고 위치, 속
도를 명령으로 제어, 추종시킨 경우를 서보모터라 부르고 있습니다.
동작전압 4.8V ~ 6V
펄스 주기 50Hz (20ms)
펄스 폭 0.2ms ~ 3ms
PD14를 사용해 서보모터를 구동합니다.
- cube MX 설정
TIM2 사용 -> pwm generation CH1 설정 -> prescaler – 1799 / counter period – 999 / pulse –
10 / timer clocks – 90MHz 설정
- keil 코드
MX_NVIC_Init();
HAL_TIM_PWM_Start(&htim2, TTM_CHANNEL_1);