
Page 443 - MDP2022-2
P. 443
3. 회로도
가. MDP 구상 회로도
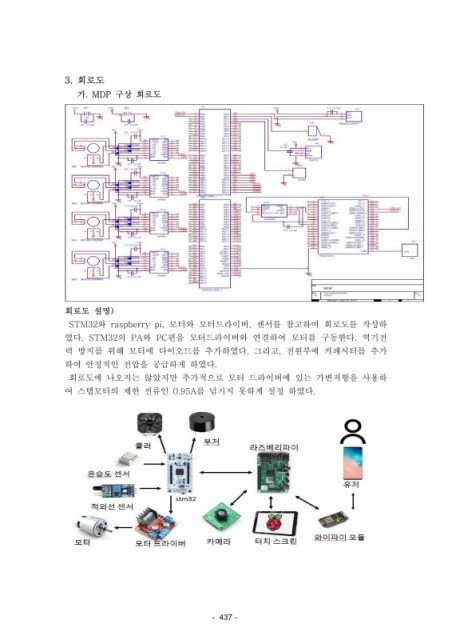
회로도 설명)
STM32와 raspberry pi, 모터와 모터드라이버, 센서를 참고하여 회로도를 작성하
였다. STM32의 PA와 PC핀을 모터드라이버와 연결하여 모터를 구동한다. 역기전
력 방지를 위해 모터에 다이오드를 추가하였다. 그리고, 전원부에 커패시터를 추가
하여 안정적인 전압을 공급하게 하였다.
회로도에 나오지는 않았지만 추가적으로 모터 드라이버에 있는 가변저항을 사용하
여 스텝모터의 제한 전류인 0.95A를 넘기지 못하게 설정 하였다.