
Page 111 - MDP2022-3
P. 111
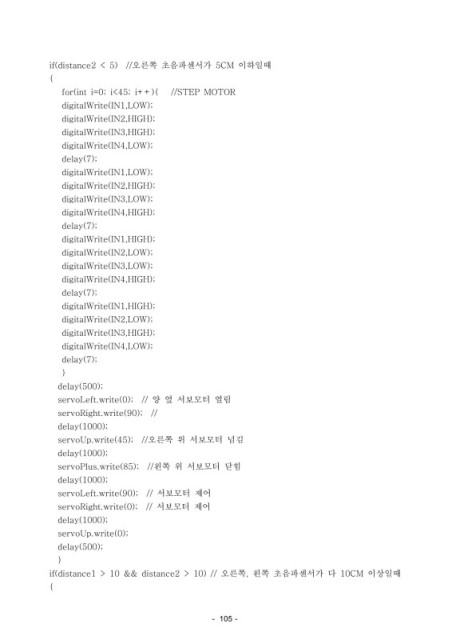
if(distance2 < 5) //오른쪽 초음파센서가 5CM 이하일때
{
for(int i=0; i<45; i++){ //STEP MOTOR
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH);
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW);
delay(7);
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH);
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH);
delay(7);
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW);
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH);
delay(7);
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW);
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW);
delay(7);
}
delay(500);
servoLeft.write(0); // 양 옆 서보모터 열림
servoRight.write(90); //
delay(1000);
servoUp.write(45); //오른쪽 위 서보모터 넘김
delay(1000);
servoPlus.write(85); //왼쪽 위 서보모터 닫힘
delay(1000);
servoLeft.write(90); // 서보모터 제어
servoRight.write(0); // 서보모터 제어
delay(1000);
servoUp.write(0);
delay(500);
}
if(distance1 > 10 && distance2 > 10) // 오른쪽, 왼쪽 초음파센서가 다 10CM 이상일때
{