
Page 405 - 3-3
P. 405
앞 페이지의 모터 카탈로그로에서 보면 기동 토크가 600(g·cm) 를 넘는 것은 RS540 뿐이다 그.
러나 이것으로는 모터 자체가 너무 크고 배터리나 모터의 중량을 가미하면 2kg 의 전체 중량을 훨
씬 넘어 버린다 그러면 어떻게 하면 좋을까. ? 그렇다 기어를 사용한다 동륜축에 기어를 부착하여. .
감속시키는 방법이다 그렇게 하면 모터의 토크를 기어에 비례하여 감속시킬 수 있다 간단한 공작. .
실험을 한다면 모형점에서도 기어 세트를 구입할 수 있는데 예를 들면 모터는, RE260 이고 기어,
세트에서 기어비가 40:1 이나 65:1 인 경우, 40:1 로 했을 때, RE260 의 기동 토크는 50~90 이므로
기어 후에는 2000 부터 3600 까지 할 수 있어 필요한, 600(g·cm) 은 충분히 구동할 수 있다는 계산
이다.
또 등속 운전시에는, RE260 의 적정 부하토크가 10∼ 15(g·cm) 이므로 40 배하며 역시, 400 부터
600(g·cm) 의 토크를 낼 수 있으므로 필요한 225×1.5 배=338(g·cm) 를 충분히 구동할 수 있다.
그러나 가속기간의 최종 단계 무렵에는 모터의 적정 부하시의 토크로 구동하는 것이 되는 셈이,
므로, 600(g·cm) 의 토크를 내기 위해서는 모터의 적정 부하시의 토크로 15g·cm 이상의 토크가 필
요하기 때문에 1.5V 로 구동하는 것은 사실 역부족이다 따라서 모터에 가하는 전압은. 3V 로 하게
된다 즉 모터가 낼 수 있는 있는 토크는 속도가 높아지면 반비례하여 내려가는 점에 주의할 필요. ,
가 있다.
회전수는 충분한가?
적정 부하시의 RE260 의 회전수는 5000∼ 10100 이므로 이 40 분의 1 은 125 252∼ 회전 분이므로/ ,
2 회전/sec 즉 120 회전 분을 충분히 커버할 수 있다/ .
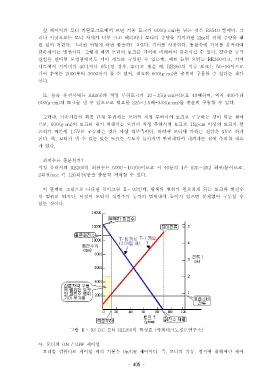
이 관계를 그림으로 나타낸 것이그림 Ⅱ - 93 인데 황색의 범위가 필요하게 되는 토크와 회전수,
의 범위로 되지만 이것이 모터의 적정부가 동작의 범위내에 들어가 있으면 문제없이 구동할 수,
있는 것이다.
그림 Ⅱ - 93 DC 모터 RE260 의 특성표 국제테크노정보연구소( )
아 모터의. ON / OFF 제어법
모터를 컴퓨터로 제어할 때의 기본은 On/Off 제어이다 즉 모터의 기동 정지에 대해서만 제어. , ,
- 405 -